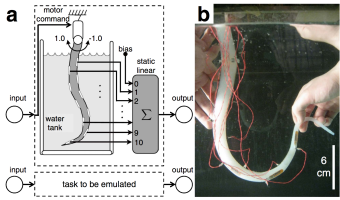
Kohei Nakajima and his colleagues argue that soft bodies are hard to control from a robotics perspective, but precisely because of their complex dynamics they can be used as information processing devices for solving hard computational problems. In a recent article they explain how they send inputs to a motor that wiggles a silicon tentacle, and read the system's output by sensing the arm's posture. I'm not entirely sure what's being calculated exactly, but the idea seems quite compelling. Also […]
Kohei Nakajima and his colleagues argue that soft bodies are hard to control from a robotics perspective, but precisely because of their complex dynamics they can be used as information processing devices for solving hard computational problems. In a recent article they explain how they send inputs to a motor that wiggles a silicon tentacle, and read the system's output by sensing the arm's posture. I'm not entirely sure what's being calculated exactly, but the idea seems quite compelling. Also see our other entries on physical computation. Sources: Nakajima et al (2015). Information processing via physical soft body (see video). Hauser et al (2014). Morphological Computation - The Body as a Computational Resource.
Added by: Pierre Dragicevic.
Category:
Physical model
Tags:
arm, morphological computing, physical computation, physical reservoir computing, silicon